Engenheiro de Computação - Universidade do Estado do Amazonas.
Participei do grupo Zagaia(projeto INdT/FUCAPI) desenvolvendo Jogos e aplicações linux para dispositivos móveis.
Atualmente estou trabalhando no Instituto Certi Amazônia onde desenvolvo jogos e aplicações voltada para polo industrial de manaus.
Este blog está voltado para alguns trabalhos que faço como hobby, atuando principalmente com programação baixo nível, dispositivos móveis, arduino e placas eletrônicas.
Olá pessoal, comprei alguns componentes novos para melhorar o robô e resolvi fazer alguns tutoriais para mostrar o melhor funcionamento de cada componente.
O componente que irei mostrar hoje é o sensor infra vermelho sharp. Ele é nada mais e nada menos que um detector de obstáculos, com isso vou tentar "simular" um sensor de estacionamento.
Estou usando:
1 - Arduino Duemilanove
2 - Sensor Sharp
3 - Led
4 - Resistor 220
5 - Buzzer
6 - Botão Liga/Desliga
7 - Fio e Protoboard
Componentes
Primeiro vamos verificar como funciona o Sensor Sharp. Utilizaremos uma chave on/off para simular a marcha ré, o sensor e um led para mostrar a presença do obstáculo.
Segue o modelo do circuito.
Circuito
Em seguida faça o upload do código
/*
**************************************
Teste do Sensor Sharp
José Maria DVD
http://josemdvdf.blogspot.com.br/
--------------------------------------
*/
int pinLed = 12;
int pinSensor = 0;
int pinChave = 2;
void setup(){
pinMode(pinLed, OUTPUT);
pinMode(pinSensor, INPUT);
pinMode(pinChave, INPUT);
}
void loop() {
int vlChave = digitalRead(pinChave);
Próximo passo é inserir o buzzer para fazer aquele barulho conhecido :D
Buzzer
O buzzer possui 2 pinos, um negativo e outro de dados. Portanto basta ligar o pino negativo no terra e o positivo em uma porta digital do arduino. Veja na figura abaixo.
Circuito Completo
Em seguida faça o upload do seguinte código:
/*
**************************************
Simulação de um Sensor de Estacionamento
José Maria DVD
http://josemdvdf.blogspot.com.br/
--------------------------------------
*/
int pinLed = 12;
int pinSensor = 0;
int pinChave = 2;
int pinBuzzer = 4;
void setup(){
pinMode(pinLed, OUTPUT);
pinMode(pinSensor, INPUT);
pinMode(pinChave, INPUT);
pinMode(pinBuzzer, OUTPUT);
}
void loop() {
int vlChave = digitalRead(pinChave);
Olá pessoal após os pequenos projetos Arduino LDR e Arduino Servo Motor resolvi criar um projeto um pouco maior: Robô seguidor de luz.
Se alguém quiser entender um pouco melhor sobre pequenas partes como LDR e Servo Motor, sugiro que vejam o link referenciado acima.
Gostaria de avisar que o robô apenas segue a luz, ou seja caso a luz incidente seja maior no lado direito ele segue para a direita, caso
a luz incidente seja maior no lado esquerdo segue para a esquerda senão segue em frente (caso não tenha luz ou a luminosidade seja homogênea).
E como eu sei onde tem mais luz ?
Para verificar a incidência de luz utilizei os LDR´s
E como mudar a direção ?
Para mudar a direção utilizei um Sero Motor.
Antes de começar o tutorial propriamente dito, gostaria de fazer um agradecimento a um amigo e grande jogador de StarCraft 2: Mateus Makarov Souza pelo apelido de Hellion ao robô. Só falta o jato de Fogo... rsrsrs
Robô Seguidor de Luz
Hellion - StarCraft 2
Vamos começar.
Lista de componentes:
1 - Arduino Duemilanove
2 - Servo
3 - 2 * LDR 5mm
4 - 2 * Resistor de 10k
5 - Bateria
6 - Protoboard
7 - Fios
8 - 2 carrinhos de brinquedo + pilhas
Passo 1
Fazer uma extensão para os LDRs. Isso faz com que as variações de luz sejam mais evidentes, além de criar um visual com a forma de um inseto, como se o robô tivesse antenas.
Se você tiver um cabo de rede velho ou que não irá usar, corte e retire dois pares de fios.
Cabo de rede
Em seguida solde os fios aos LDRs e use fita isolante.
Soldar os fios a LDR
Antena LDR
Obs.: Tente deixar os fios trançados como mostra a foto acima.
Pra quem quiser e tiver material pode deixar as antenas um pouco mais amigáveis utilizando o tubo termo retrátil.
Inserindo o tubo
Aquecendo para fixar
Resultado final
Faça para os dois LDR´s
Passo 2
Assim que estiver pronto podemos fazer o nosso primeiro circuito. A figura abaixo mostra o circuito do LDR. Caso você queira ver como funciona um LDR pode ver nesse link.
Circuito LDR
Foto - Circuito LDR
Foto - Circuito LDR
Em seguida rode o seguinte código e veja se está funcionando normalmente. O resultado será apenas via serial.
int pinLDRDir = 5; // pino analógico 5 direita
float LDRDir = 0; // receberá o valor do LDR da direita
int pinLDREsq = 0; // pino analógico 0 esquerda
float LDREsq = 0; // receberá o valor do LDR da esquerda
void setup() {
Serial.begin(9600);
}
void loop(){
//O valor lido da porta será no intervalo (0 a 1023)
LDRDir = analogRead(pinLDRDir);
LDREsq = analogRead(pinLDREsq);
//Mostra na serial
Serial.print("LDR Dir= ");
Serial.println(LDRDir);
Serial.print("LDR Esq= ");
Serial.println(LDREsq);
//Se 75% de LDREsq >= LDRDir - Vira a esquerda
if( LDREsq*0.75 >= LDRDir)
Serial.println("Vira a esquerda");
//Senão se 75% de LDRDir >= LDREsq - Vira a direita
else if( LDRDir*0.75 >= LDREsq)
Serial.println("Vira a direita");
else
Serial.println("Centro");
delay(500);
}
Passo 3
Após montar o circuito LDR, partimos para as ligações do Servo Motor. Essa parte é a mais fácil pois o Servo não precisa de nenhum circuito adicional, apenas das ligações com os pinos do arduino.
O servo motor possui 3 fios:
Amarelo : Fio de dados
Vermelho: VCC (5v)
Marrom: GND (terra)
Portanto devemos apenas ligar um fio ao pino 9 do arduino, que será o de dados, outro ao vcc e outro ao terra. A figura abaixo mostra essas ligações. Caso você queira ver como funciona um Servo Motor, clique no link.
Fios Para o Servo
Passo 4
Chegou o grande momento de montarmos o nosso robô. Pegue o primeiro carrinho e desmonte, utilizaremos suas rodas da frente para controlar a direção do nosso robô.
Carro 1 - Normal
Carro 1 - Desmontado
Carro 1 - Retire as rodas da frente.
Passo 5
Em seguida, de alguma maneira (rsrs), cole as rodas ao servo motor.
OBS.: Antes de colar as rodas ao Servo, certifique-se que ele esteja posicionado em 90º. Você tem duas maneiras de fazer isso. A primeira é girar o eixo até o final para ambos os lados e tentar achar o centro. A segunda eh fazer via software.
No software você deve fazer as seguinte ligações:
Servo
OBS.: Não esqueça de usar uma bateria para alimentar o arduino. Caso você não tenha uma bateria com o plug para o arduino, esse link mostra como fazer.
Em seguida rode o código:
/*
**************************************
Colocando o Servo em 90º
José Maria DVD
http://josemdvdf.blogspot.com.br/
--------------------------------------
Com o Servo posicionado de maneira correta, fixe-o de alguma forma. Peço desculpas pois não sou muito habilidoso nesses detalhes, o trabalho ficou um pouco feio porque usei fitas e abraçadeiras.
Servo + Rodas
Passo 6
Agora chegou a vez do segundo carro. Faça o mesmo processo, a diferença é que agora você ficará com as rodas traseiras que servirá de tração, com a base do carrinho que servirá de suporte para o protoboard (circuito completo) e chassis, além do motor e as pilhas que farão o nosso robô andar.
No meu caso, tive que desmontar todo o carrinho pois ele tinha outras funções que não me serviriam. Também estava com sorte pois o carrinho já tinha duas chaves, uma para ligar/desligar e outra para fazer o carro ir para frente ou ré. Caso o seu não tenha, basta ele andar mesmo :D.
Carro 2 - Desmontado
Passo 7
Após desmontar o carrinho, verifique se o motor e as chaves estão funcionando normalmente. Na hora de testar o ideal é usar as pilhas (observe que não usei :/ ), pois com elas podemos ter certeza que o suporte está normal.Veja o vídeo.
Passo 8
Após os testes, remonte e deixe as rodas traseiras, o suporte para a pilha, e toda a parte de tração.
Carro 2 - Remontado
Carro 2 - Remontado, com tração completa
Passo 9
Bom, agora que tudo está funcionando vamos começar a integração. Junte o servo/rodas dianteiras ao chassis. Nesse passo tive vários problemas por falta de material rsrsrs, mas no fim deu tudo certo.
Integração - Rodas dianteiras
Integração - Rodas Dianteiras
Passo 10
Agora vamos testar o servo integrado ao chassis. Use as mesmas ligações da figura servo no passo 5 erode o seguinte programa:
/*
**************************************
Teste do Servo
José Maria DVD
http://josemdvdf.blogspot.com.br/
--------------------------------------
*/
#include
<servo.h>
Servo servo1;
int pos = 90;
char lado = 'n';
void setup()
{
servo1.attach(9); // Porta de dados do servo
Serial.begin(9600); // inicializa porta serial
servo1.write(pos);
}
void loop(){
lado = Serial.read();
if (lado == 'l') ){
pos = 10;
}else if (lado == 'r'){
pos = 170;
} else pos = 90
lado = 'n';
servo1.write(pos);
delay(350);
}
OBS.: É necessário abrir o serial monitor do skd e digitar a letra 'l' para esquerda e 'r' para a direita.
Veja o vídeo de demonstração.
Passo 11
Próximo passo é integrar o circuito do passo 3 ao servo, lembrando que o fio AMARELO é de dados, o VERMELHO é o VCC (5v) e o MARROM o GND (terra). Em seguida rodar o código:
#include <servo.h>
int pinLDRDir = 5; // pino analógico 5 direita
float LDRDir = 0; // receberá o valor do LDR da direita
int pinLDREsq = 0; // pino analógico 0 esquerda
float LDREsq = 0; // receberá o valor do LDR da esquerda
Servo servo1;
int pos = 90;
void setup() {
servo1.attach(9);
servo1.write(pos);
}
void loop(){
//O valor lido da porta será no intervalo (0 a 1023)
LDRDir = analogRead(pinLDRDir);
LDREsq = analogRead(pinLDREsq);
//Se 75% de LDREsq >= LDRDir - Vira a esquerda
if( LDREsq*0.75 >= LDRDir){
pos = 10;
}
//Senão se 75% de LDRDir >= LDREsq - Vira a direita
else if( LDRDir*0.75 >= LDREsq){
pos = 170;
}
//Senão - centro
else{
pos = 90;
}
servo1.write(pos);
delay(350);
}
Veja os vídeos.
Passo 12
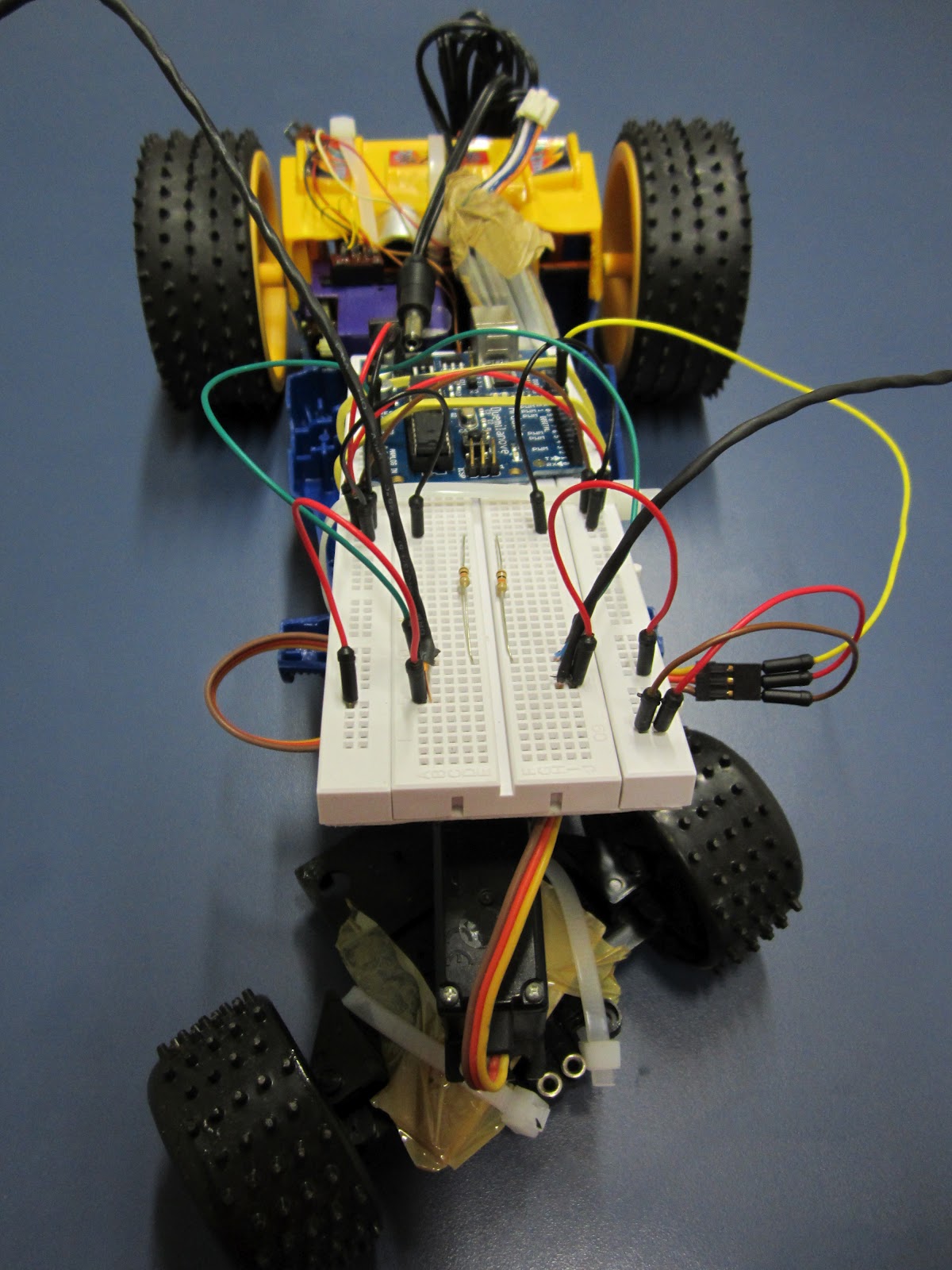
Agora integre o circuito completo ao chassis do robô. Usei uma liga pra fixar o arduino ao protoboard e uma abraçadeira plástica para fixar o protoboard ao chassis.
Robô seguidor de luz - final
Robô seguidor de luz - final
Agora com o robô completo refaça os testes.
Perceba que o robô tem uma reação um pouco demorada, portanto mude a última linha de código do passo 11 para delay(100); e veja como a resposta aos comandos fica mais rápido.
Passo 13 - FINAL
Após alguns testes em campo, percebi que o robô não conseguia fazer as curvas direito. Isso acontecia porque o ângulo que o servo rotacionava era muito alto, então fiz alguns ajustes e cheguei a um ponto bom. Você pode fazer isso com o seu também, faça vários testes e veja qual o melhor ângulo de posicionamento possível. Segue o código final:
#include <servo.h>
int pinLDRDir = 5; // pino analógico 5 direita
float LDRDir = 0; // receberá o valor do LDR da direita
int pinLDREsq = 0; // pino analógico 0 esquerda
float LDREsq = 0; // receberá o valor do LDR da esquerda
Servo servo1;
int pos = 90;
void setup() {
servo1.attach(9);
servo1.write(pos);
}
void loop(){
LDRDir = analogRead(pinLDRDir);
LDREsq = analogRead(pinLDREsq);
//Se 75% de LDREsq >= LDRDir - Vira a esquerda
if( LDREsq*0.75 >= LDRDir){
pos = 60;
}
//Senão se 75% de LDRDir >= LDREsq - Vira a direita
else if( LDRDir*0.75 >= LDREsq){
pos = 120;
}
else{
pos = 90;
}
servo1.write(pos);
delay(100);
}
Olá povo, hoje vou fazer um pequeno exemplo de como usar um LDR (Light Dependent Resistor, ou em português Resistor Dependente de Luz).
Um LDR é um tipo de resistor cuja resistência varia conforme a intensidade de luz que incide sobre sua superfície. Portanto o LDR "transforma luz em valores de resistência".
A idéia é poder controlar a intensidade de um LED de acordo com a intensidade de luz que incide sobre o LDR, ou seja, quanto mais luz tivermos no local, menor será o brilho do LED e quanto mais escuro, maior será o brilho do LED.
O primeiro passo é fazer as devidas ligações como no circuito abaixo:
em seguida o código:
/*
***Arduino + LDR***
José Maria DVD
*/
int pinoLED = 9; // pino digital 9
int pinoLDR = 5; // pino analógico 5
int LDR = 0; // receberá o valor do LDR
int LED = 0; // valor do LED
void setup() {
Serial.begin(9600);
}
void loop(){
//O valor lido da porta será no intervalo (0 a 1023)
LDR = analogRead(pinoLDR);
//Mostra na serial
Serial.print("LDR = ");
Serial.println(LDR);
//Ajuste de valores para um melhor filtro
if(LDR > 600) LDR = 600;
else if(LDR < 100) LDR = 100;
//Tranforma uma escala de valores em outra (255 a 0).
LED = map(LDR, 100, 600, 255, 0);
analogWrite(pinoLED, LED);
delay(50);
}
Resultado final:
Veja o vídeo do funcionamento.
Observações e Comentários:
1 - Você deverá fazer alguns ajustes dependendo da intensidade de luz no ambiente. No meu caso precisei ajustar a seguinte linha de código:
//Ajuste de valores para um melhor filtro
if(LDR > 600) LDR = 600;
else if(LDR < 100) LDR = 100;
//Tranforma uma escala de valores em outra (255 a 0).
LED = map(LDR, 100, 600, 255, 0);
Normalmente o valor do LDR é de 0 a 1023 no entanto com os testes feito no ambiente, observei que o valor variava de 50 a 700. Portanto optei por diminuir o intervalo (100 a 600) e com isso obtive um resultado final mais concreto(o LED chegava a apagar totalmente).
2 - Aconselho estudar um pouco sobre a função map, com ela boa parte de seus problemas serão resolvidos.
3 - O resistor de 10k é para o LDR e o de 220 é para o LED. Aconselho também estudar um pouco sobre Divisor de Tensão.
OBS.: Dependendo do servo que esteja trabalhando, será necessário utilizar uma fonte externa para alimentação, o círculo vermelho indica onde deverá ser inserido. No meu caso usei uma bateria.
Bom, a ideia é que o servo se mova para a direita ou para a esquerda, usando a porta serial como parâmetro de entrada. Para fazer o controle do servo utilizaremos um biblioteca nativa do arduino chamada Servo.
OBS.: Para quem não sabe, o servo possui 180º de movimento(0 até 179 = 180 posições). Portanto usaremos uma variável chamada pos para fazer esse controle. Utilizaremos também uma outra chamada graus, que será o nosso incremento de posição.
Nesse caso a variável pos possui valor inicial 90 e a varável graus possui valor 10. Com isso teremos para a varável pos um valor mínimo de 0 e máximo de 170. Caso queira ter uma melhor precisão, basta diminuir o valor de graus.
Segue o código:
/*
** Servo **
José Maria DVD
*/
#include <Servo.h>
Servo servo1;
//variavel de posicao do servo, inicialmente com 90(meio), já que o servo varia entre 0-179 graus
int pos = 90;
int graus = 10;
char lado;
void setup()
{
servo1.attach(9); // Porta de dados do servo
Serial.begin(9600); // inicializa porta serial
}
void loop(){
lado = Serial.read();
//verifica a letra e se chegou ao valor máximp da posição, senão incrementa x graus
if (lado == 'l' && pos < (180-graus) ){
pos += graus;
}
//verifica a letra e se chegou ao mínimo da posição, senão diminiu x graus
else if (lado == 'r' && pos >= graus){
pos -= graus;
}
lado = 'n';
//muda de posicao
servo1.write(pos);
//delay de 350ms;
delay(350);
}
Bom, O primeiro passo é montar o circuito, para isso use a imagem abaixo.
O segundo passo é a codificação
/*
** DISPLAY LCD 16X2 **
José Maria DVD
*/
#include
//Inicializar o LCD
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
void setup() {
//Setup do LCD com o númnero de colunas x linhas
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("Hello World!");
//Pular para a coluna 1 linha 1
lcd.setCursor(1, 1);
lcd.print("o");
lcd.setCursor(0, 1);
lcd.print("_");
}